Project 09 Amphibious Robot for Cleaning Waterways
Around 80% of ocean plastic pollution originates from large rivers, contributing to the 10 million tonnes of waste that is fed into our oceans annually. In London alone, 2,150 bottles are collected from the Thames each month. This is an ongoing problem that poses threats to nature, animals, and humans.
Although a myriad of solutions are currently offered on the market, their labour-intensive nature, limited storage capacity, and restricted mobility makes them very short-term in use and expensive. The Amphibious Robot aims to collect, process, and dispose of litter in these waterways before it reaches the ocean, decreasing human interaction and leading to cheaper and more sustainable systems to assist in a global clean-up effort.
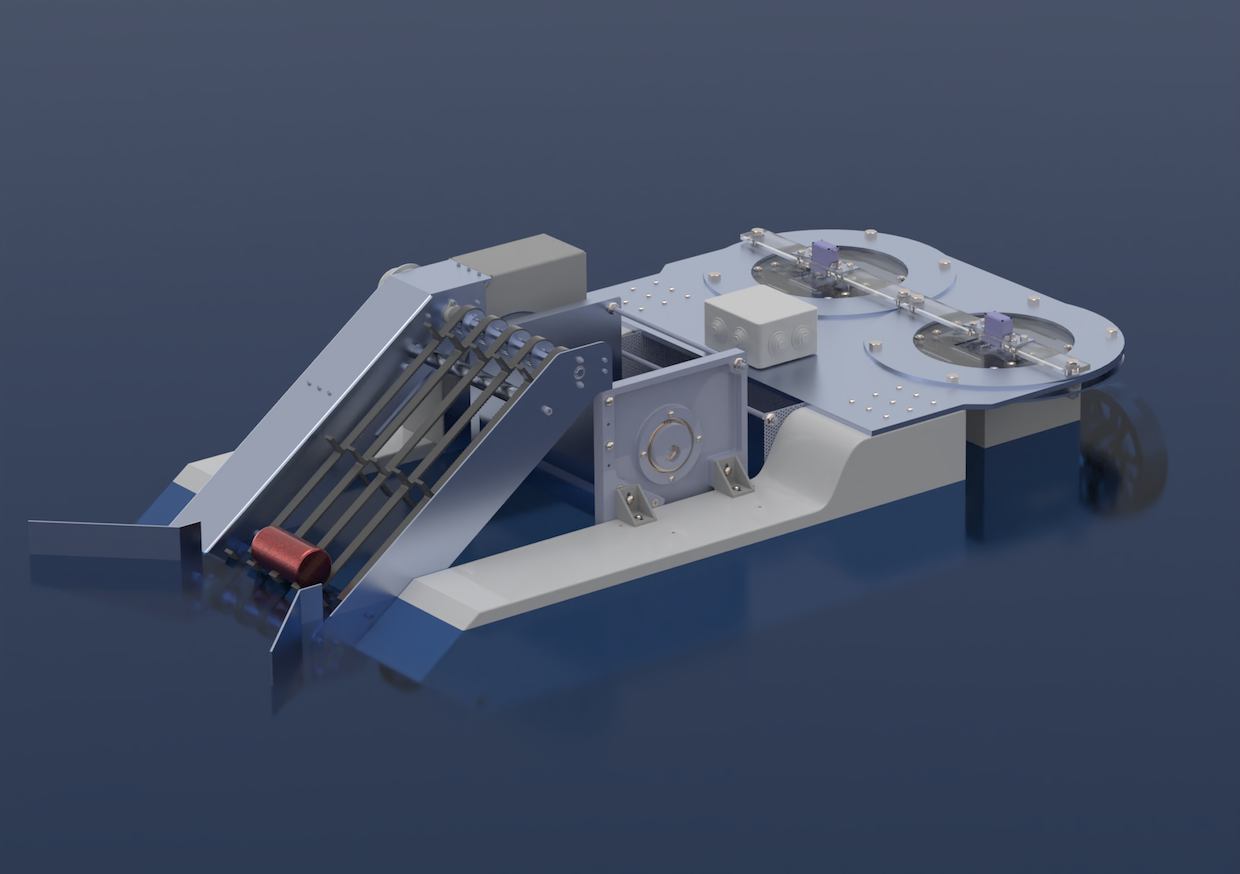
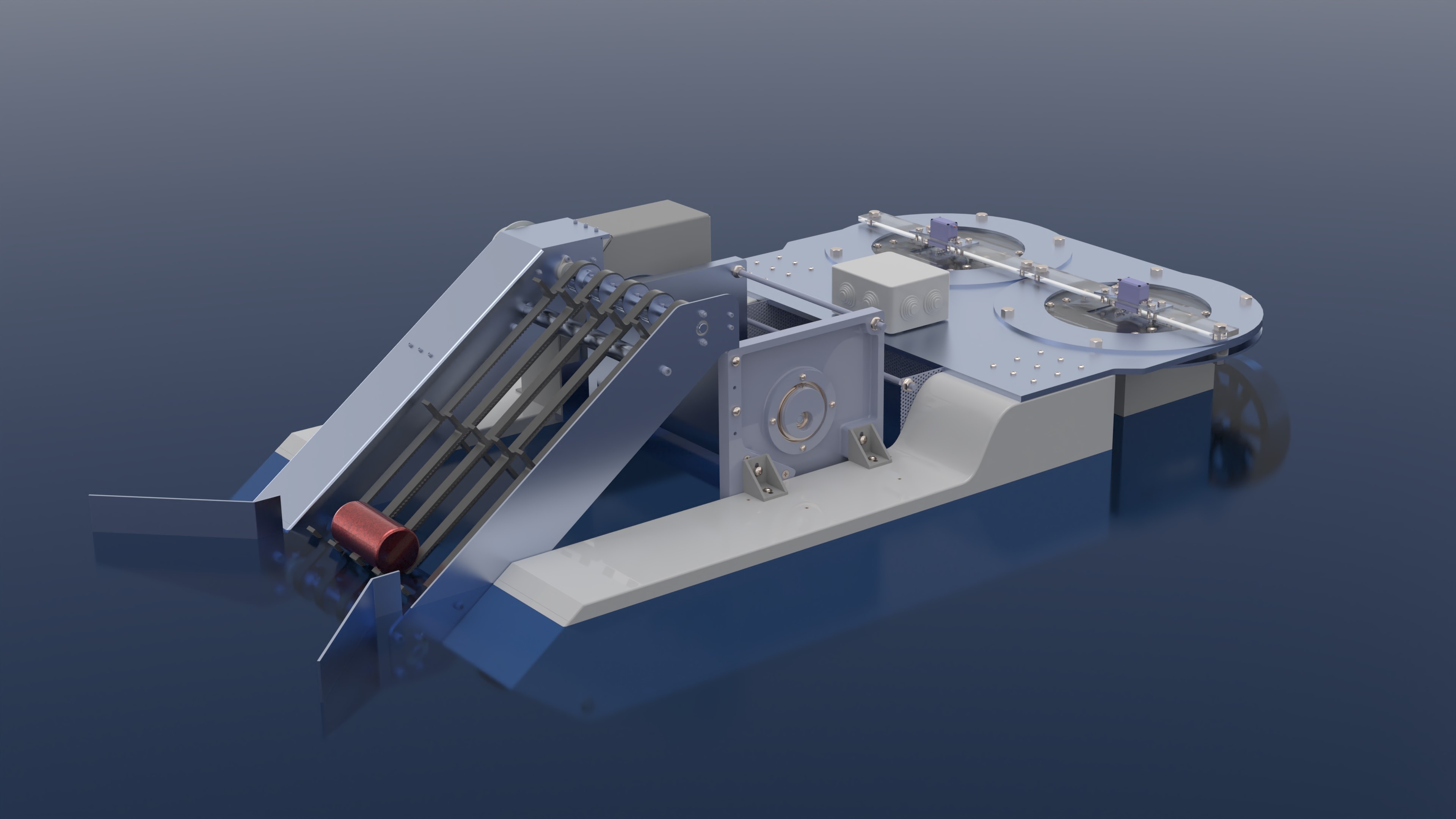
This project comprises of three sub-assemblies: Hull & Propulsion, Collection, and Storage & Discharge. This robot is able to collect waste from the surface of any waterway, including bottles, cans and plastic wrappers, through a conveyor belt system. Subsequently, it guides it into a crushing mechanism before it is stored into a basket. The propulsion was designed to be able to drive the robot both in water and on land. This allows for autonomous on-land discharge of the waste collected, minimising human labour required. The modular design serves to seamlessly join the three sub-systems into one, whilst the remote-controlled nature of this robot has the potential for full autonomous functionality in the future. The Amphibious Robot explores ways in which the performance of water clean-up devices can be improved, implementing some of these changes and showing great potential for future iterations.
Click the arrow to show/hide an individual project.
DMT09A Hull and Propulsion
In recent years, the wellbeing of local aquatic life has become a major concern due to the increase in the volume of rubbish polluting waterways. To protect the local fauna, waterways need to be kept clean, which is the main impetus behind the development of the Amphibious Trash Collecting Robot.
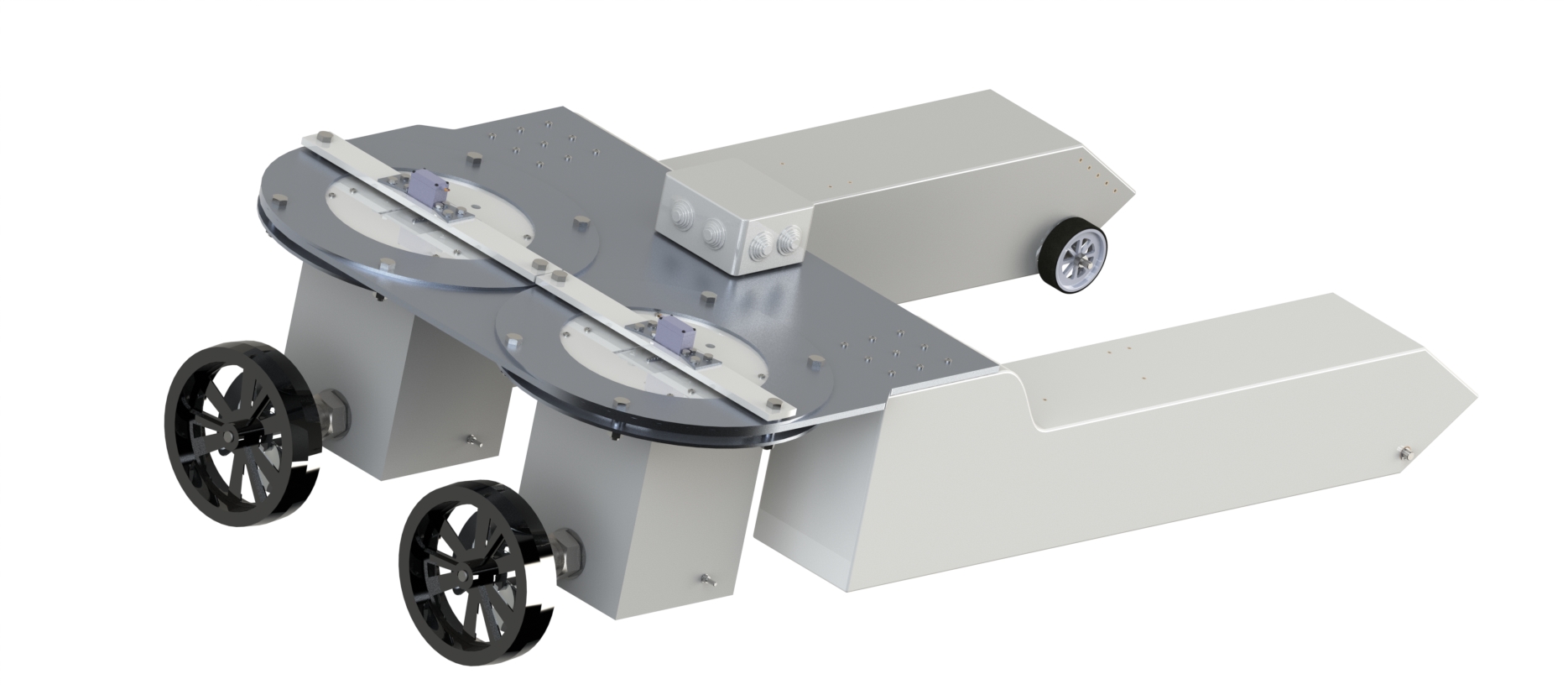
The Amphibious Robot aims to clean waterways of small rubbish such as cans and bottles in a radius of up to 2 miles from its starting point. This group focused on the design of the hull and propulsion mechanisms for the robot. The hulls are designed in a catamaran style to ensure stability and to allow for easy integration with the other project sub-assemblies. The robot can reach speeds of up to 5km/h in water, allowing for a fast and efficient cleaning process. It is designed for operation in both land and water and can propel itself in both mediums using a single mode of propulsion based on a novel propeller-wheel design. The robot is propelled on land using a 2-wheel drive system and in water using two 6-inch propellers, which are both located on the same driveshaft. The transition between land and water occurs on a ramp located on the bank of the waterway, which facilitates a smooth change between propulsion modes. It transitions between each propulsion mode using servo motors that rotate the propeller-wheels, meaning the propellers are engaged on water, and the wheels are engaged on land. The robot’s journey begins and ends on the land, when the current cycle’s trash is disposed in rubbish bins on the bank.
Since the 1950s, over 6.3 billion tons of plastic waste have been produced without being recycled, with a significant proportion present in waterway environments. The steady increase in macroplastic pollution has thus considerably modified and threatened marine ecosystems, without many corresponding measures being undertaken in order to reverse this trend.
To this end, the Amphibious Robot super-project was completed to assist in reducing plastic litter on waterway surfaces. The device can thus effectively travel, collect, and store plastic bottles, cups and wrappers, which account for over 25% of the total plastic waste in European freshwater environments. In particular, our team was responsible for the design and manufacture of the collection sub-assembly, whilst maintaining good communication and collaboration with the other two sub-assemblies to ensure an operational device.
Our collection sub-assembly consisted of 5 parallel timing belts with embedded parallelepiped cleats to pick up the plastic litter. The driving system is operated by a direct drive DC motor and encapsulated in Aluminium sheet components to ensure an IPX6 waterproof rating whilst avoiding potential corrosion risks. Designed to have an operating time of 1.5 hours and delivery rate of 24 bottles per minute, if the robot is operated for 600 hours per annum as per the PDS, the prototype is capable of removing over 860,000 units of trash (bottles/cans/plastic wrappers) each year from polluted waterways prior to annual servicing.
Litter in waterways has been a critical concern for a number of years, with some waste taking anywhere from a week to 600 years to decompose. Nonetheless, current solutions are facing some serious limitations. Firstly, static storage containers restrict the storage capacity of these devices, shortening in-water operation. This, added to a neglect of on-land discharge, increases costs and time due to the significant human interaction required.
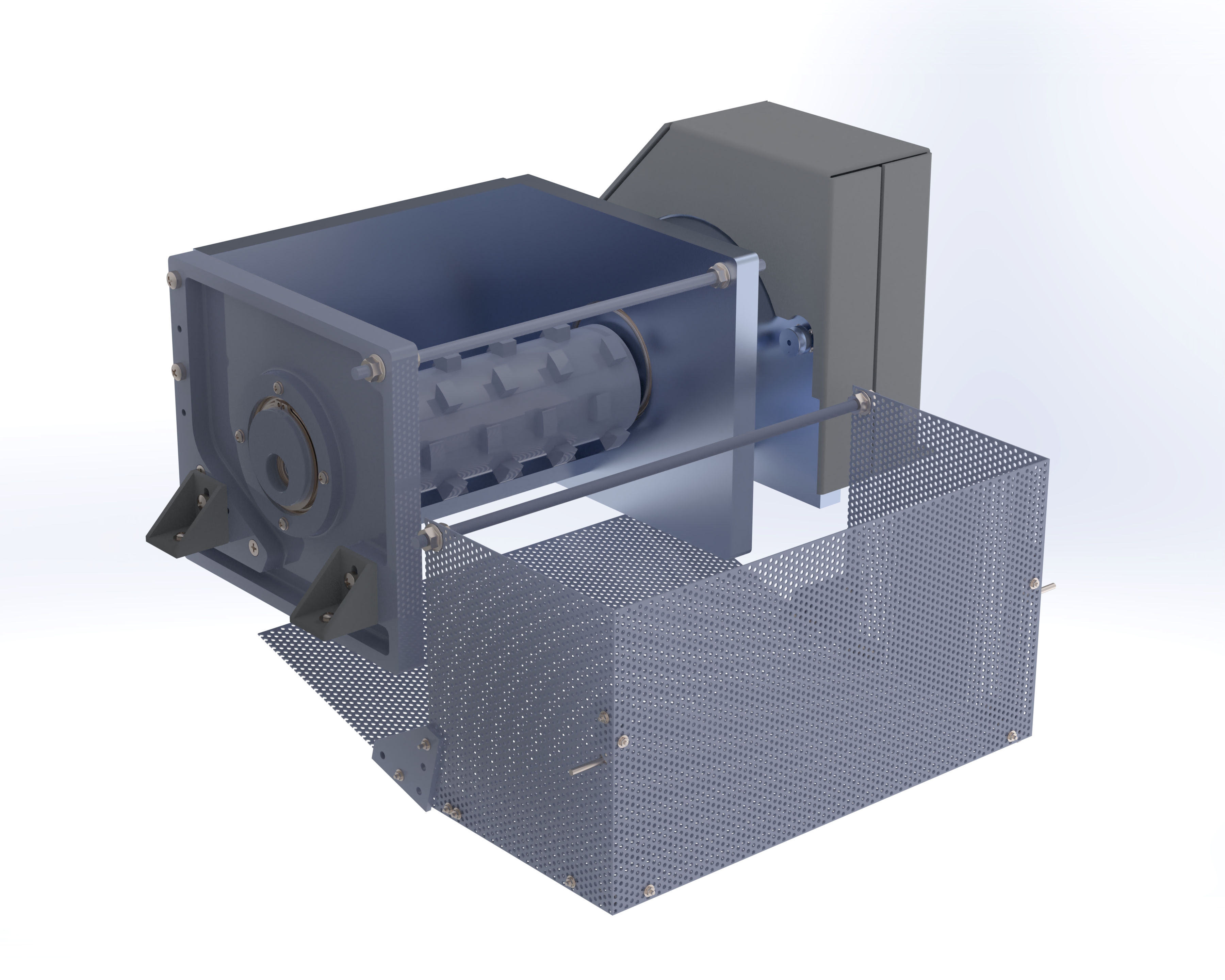
The Storage & Discharge sub-assembly is remote controlled and is able to process waste for sorting and recycling, subsequently disposing of it onto land. This is possible thanks to the two systems present: crushing and disposing. The former is an eccentrically rotating toothed-roller which crushes gravity-fed litter against a rigid, tapered peg, achieving a reduction in volume of up to 80%. The disposal system, instead, comprises of a horizontal, perforated, rigid basket that pivots into a vertical position when discharging on land.
Designed to be capable of 24/7 operation in 1.5 hour charge cycles, it can store litter at a rate greater than that at which it is produced on the Thames in Hammersmith. The autonomous discharge enables the robot to operate even in remote environments, whilst the on-board processing lengthens in-water operation and reduces the cost of on-land waste processing. This design also has potential for future improvements, including the sorting of collected litter and a fully autonomous operation.
 See the Poster
See the Poster