The aim of the overall project was to design the main mechanical subsystems of a 3U nanosatellite based on 3U CubeSAT specifications. The nanosatellite is to be launched into Low Earth Orbit (LEO) for a 2-year operation period, launched into space via SpaceX’s Falcon 9 launcher.
The nanosatellite will carry out maritime surveillance based on the Automatic Identification System (AIS), in space. The AIS is an automated network of transmitters and receivers used in the maritime industry to monitor global naval traffic. AIS currently relies /on a network of land-based stations and the transponders are limited by the Earth’s curvature to a horizontal transmission radius of no further than 74km. This restricts tracking to coastal areas, which has become problematic due to an increased requirement for global coverage as more ships travel into remote areas. A method of increasing the coverage is the use of satellite-based Automatic Identification Systems (SAT-AIS). The ships' original AIS transponders can transmit vertically to a satellite in low Earth orbit (LEO), which then transmits data back to ground-based stations or ships.
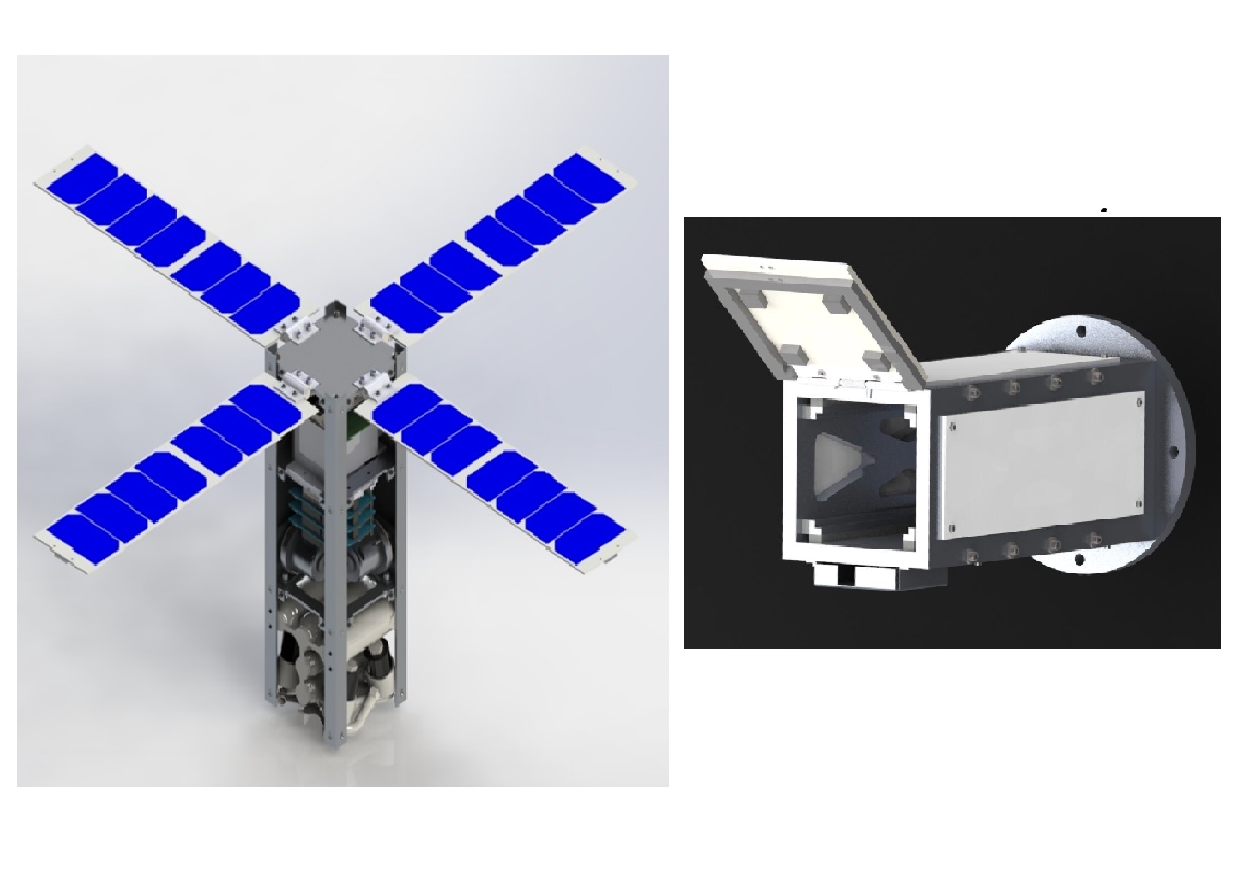
The main structure is to provide a platform where all constituents of the satellite would be housed and mounted onto, designed to ensure durability and functionality of the satellite in the harsh environment of space. The microthrusters is to provide a de-orbiting strategy and compliance with space debris mitigation requirements. With four nozzles, each directed at different angles lengthwise to the satellite, all axes of motion will be accounted for during the deorbiting maneuver as well as attitude control, alongside the reaction wheel subsystem. There are 3 reaction wheels, with one aligned with each axis of the satellite. The spinning of each of these wheels will allow the satellite to rotate about each respective axis. This controls the orientation of the satellite - incident to the sun - during its mission. The solar panels are deployed in a "flower pattern" which would supply 19.6W to the nanosatellite. The generated electricity will be stored in the battery system and deliver constant voltage to the respective subsystems to function while the satellite is eclipsed by Earth’s shadow. The satellite deployment system will sit inside the Falcon 9 launcher in which the nanosatellite will be placed: protecting the satellite from launch stresses and vibrations. It will be deployed into orbit – once the launch system has reached the desired position - within the Falcon 9 deployment velocity limits.
Click the arrows to show/hide an individual project.
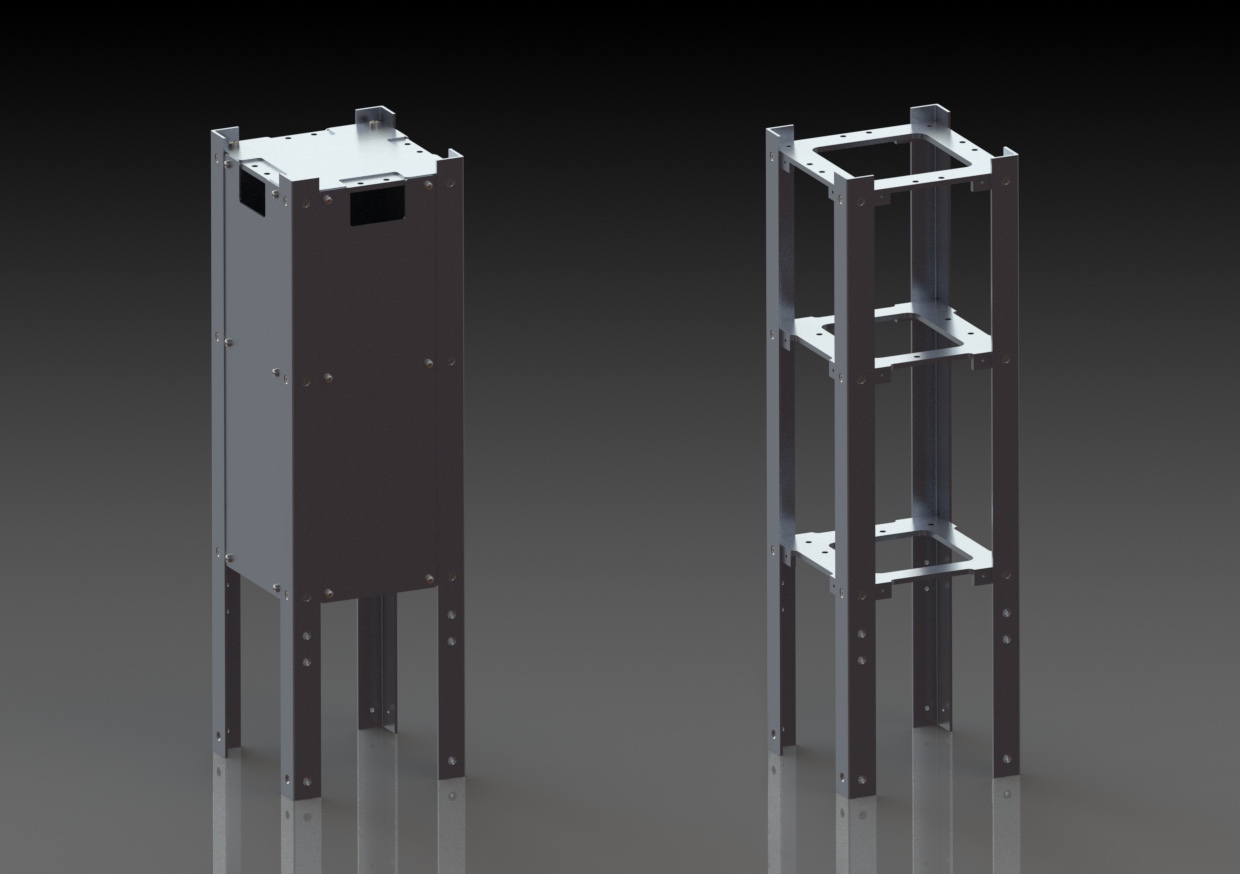
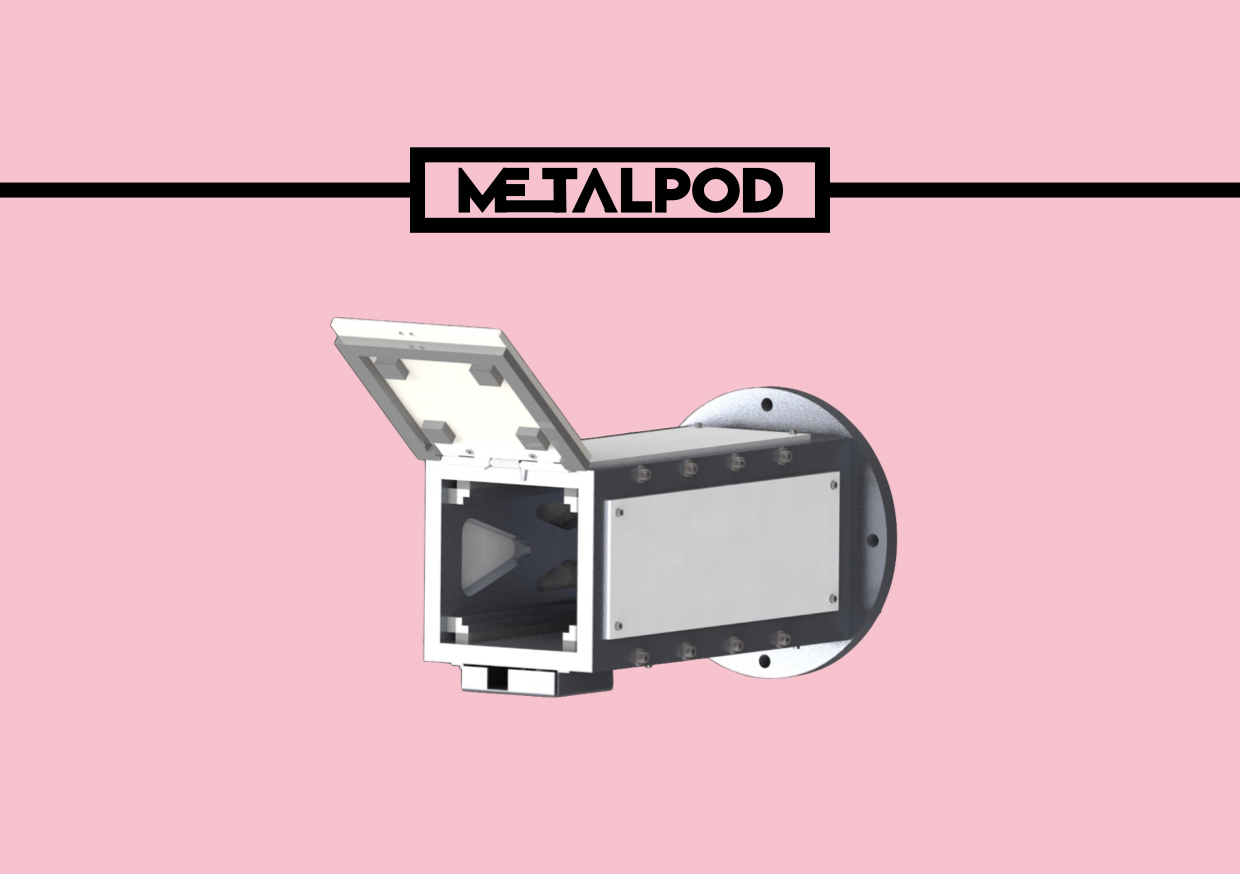
DMT02A Satellite Deployment System
Commercial spaceflight has allowed the end consumer to send virtually any payload at a reduced cost. Many projects have benefitted from this recent advancement and sending sensors into orbit is only becoming easier. Smaller satellite designs are becoming increasingly popular as they reduce the cost of launch considerably; the goal of this subassembly is to design a deployment system for a 3U CubeSat nanosatellite.
A deployment system or dispenser is required to ensure the safe passage of the satellite from earth and further from the rocket to its orbit. As such, key considerations include large thermal fluctuations, vibrations, radiation, shock, weight and launch forces.
Metalpod was designed as a culmination of these considerations. The box design consists of a spring-loaded pusher plate to release the satellite similar to a "jack-in-the-box" which is compatible with a SpaceX Falcon 9 Rocket. Internally, damping pads protect the satellite and offer vibration isolation while its panelled design ensures a sturdy and protective casing that can withstand the combined loads and vibrations of a rocket launch.
As a world-renowned space ranger once said, this project will bring us “To infinity and beyond”.
Satellites are deployed for various purposes such as monitoring weather, establishing communications and for exploration. As most satellites are large and heavy, the CubeSat Project was initiated in 1999, creating a smaller satellite which would be more accessible and cost-friendly for students and enthusiasts to design and launch.
The overall miniature satellite project aim is to deploy an Automatic Identification System (AIS) which tracks ships– preventing collisions, aiding with navigation and helping with search and rescue operations. The satellite-based AIS system would overcome the limitation faced by traditional land-based systems of only being able to track ships up to 74 km from the shore, allowing for world-wide coverage. Our satellite is to comply with the 3-unit CubeSat specifications of dimensions 300 × 100 × 100 mm and mass 4 kg, launched using a SpaceX Falcon launcher. It will have a sun-synchronous polar orbit with altitude 635 km and 97.71° inclination.
The main structure of the satellite is responsible for supporting the other subsystems (solar panels, thrusters and reaction wheels) and integrating them efficiently and safely. The main structure includes four rails, to support the structure and to attach to the 3 mounting brackets, which provide a platform for the integration of other subsystems and miscellaneous components. The rails and mounting brackets are manufactured with aluminium 6082-T6. Panels for the top and side faces of the satellite are also included in the main structure, to protect the internal components from direct radiation. They are manufactured from aluminium 5251-H22 and are fixed to the mounting brackets. Weight reduction is an important consideration in the aerospace industry– the components of the main structure have been designed with optimisation for minimum mass in mind.
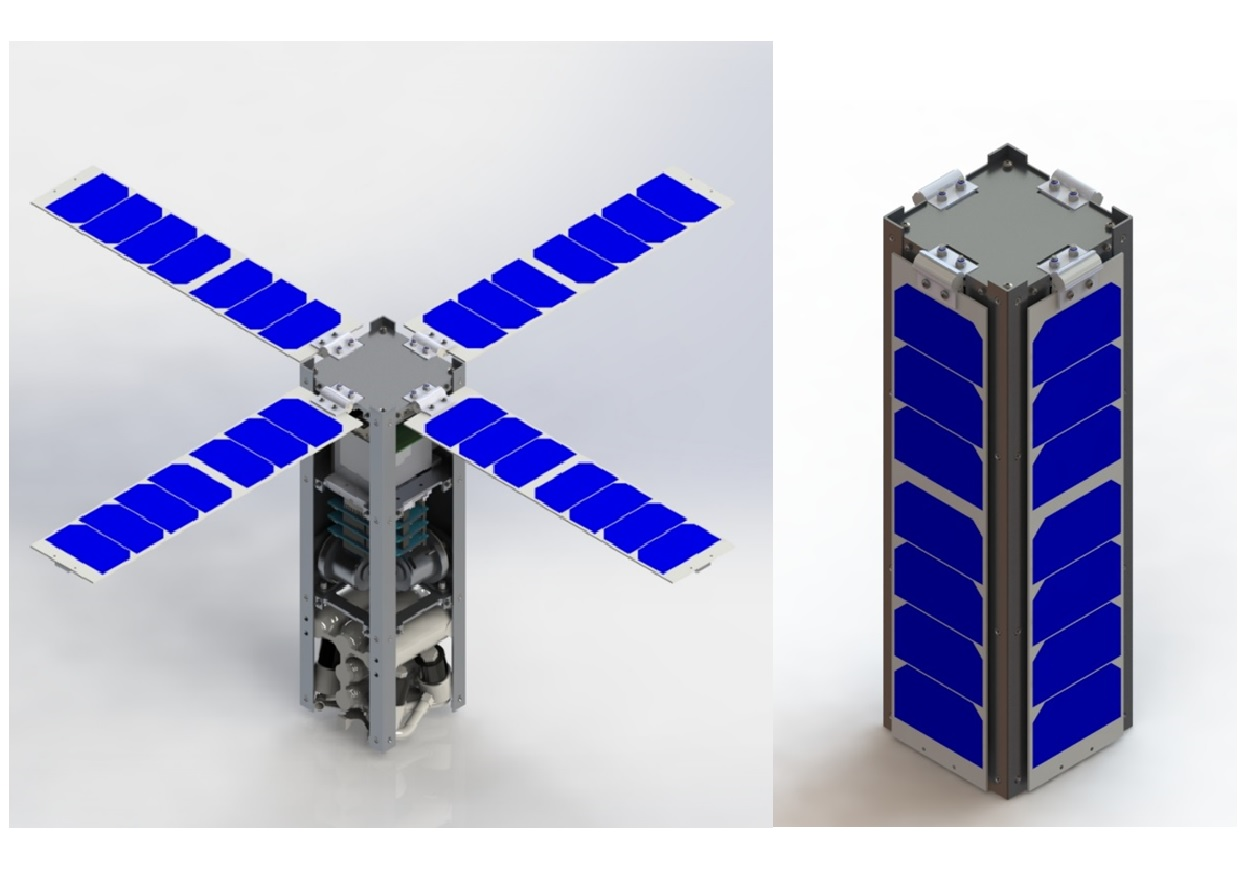
The aim of the overall project was to design the main mechanical subsystems of a nanosatellite carrying out maritime surveillance from space. The functionality requirements of these satellites, along with the dimensional constraints imposed, often results in a need for deployable versions of certain subsystems. The primary objectives of this subassembly were to manufacture a reliable and safe solar panel deployment mechanism - ensuring it could withstand the launch conditions - and design a system that could provide a constant power output of 19.6W to the subsystems in the CubeSat throughout its 2-year operation period. This is achieved by using solar panels and a battery array to generate and store power, respectively.
To maximise the surface area of the solar array incident to the sun, foldable panels were chosen while taking into consideration dimensional constraints during launch. The developed flower design provides a large deployed area with minimal space consumption when stowed.
The solar panels are stowed using a nylon string, which is cut once the satellite is in orbit using a nichrome burn wire mechanism, releasing the solar panels. This hold and release device is mounted onto a movable frame to accommodate for the temperature variations and vibrations characterizing the launch conditions. To limit the power losses incurred by the burn wire, a switch will automatically be disconnected upon detecting the successful deployment. The solar panels are actuated using a torsion spring-loaded hinge and are held in deployed positions with custom latches.
The power generated by the solar array is stored in a battery system to ensure the functionality of respective subsystems when the satellite is eclipsed by Earth’s shadow. Voltage regulators ensure constant voltage supply and prevent damage to the respective subsystems.
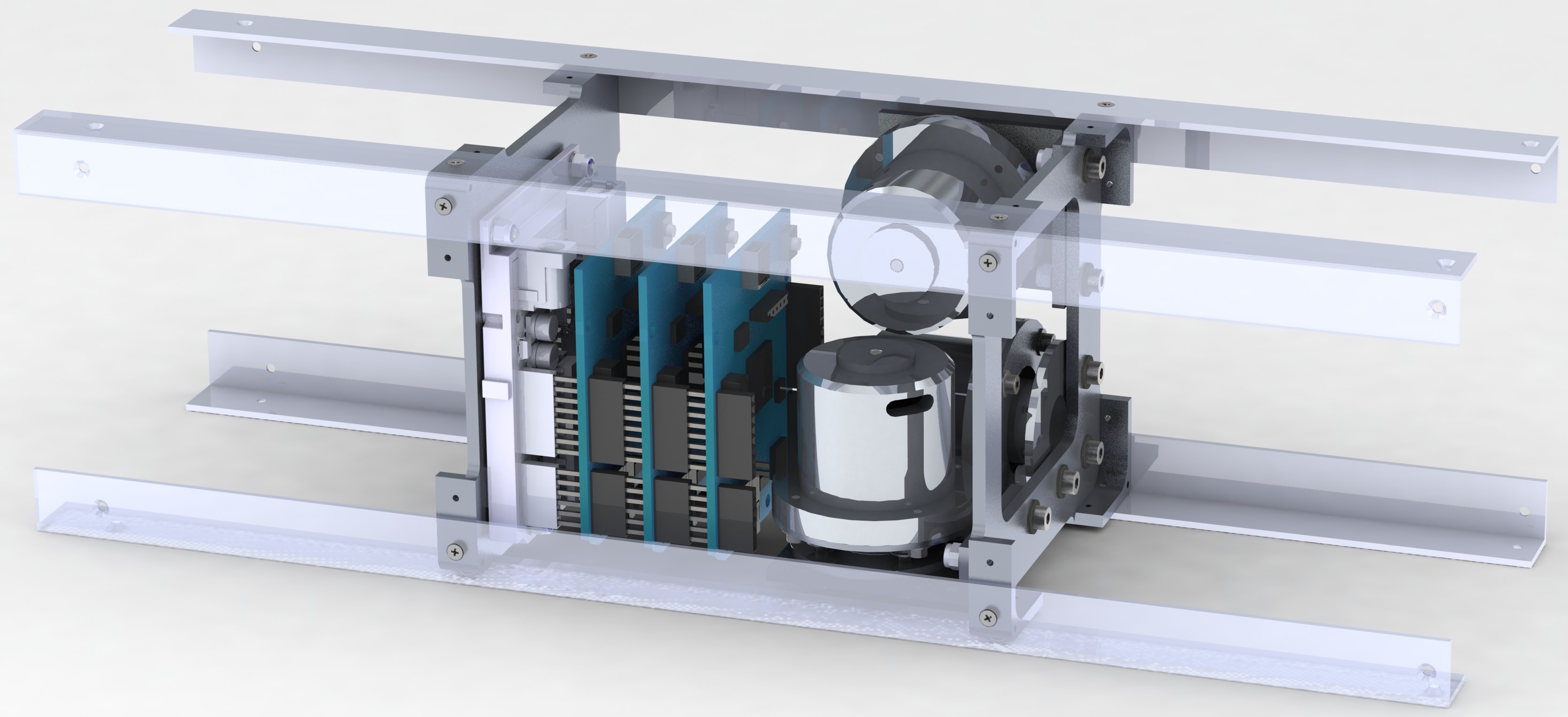
Satellites often require orientation (attitude) control in space to fulfill specific mission requirements. Reaction wheels are one of the most accurate options for such attitude control. A reaction wheel features a flywheel which exerts a torque on a satellite when the flywheel speed is changed, and the torque is used to adjust a satellite’s desired angular velocity and position. Three-axis control is achieved with a minimum of three orthogonal reaction wheels: each wheel spins independently to provide control torques about their respective axes.
Group 02D was tasked with developing a reaction wheel sub-assembly for the mini-satellite assembly. The attitude control system's purpose was to maintain a sun-facing orientation for the satellite’s solar panels while rejecting the disturbance torques experienced in space. It must also adhere to strict size, mass, and power constraints.
The final manufactured design consists of only one fully functional reaction wheel and two dummy wheels that replicate the mass and inertia properties of each reaction wheel - this decision was made to reduce overall expenses. A brushless DC motor drives the flywheel via a flexible coupling that connects the shafts. Additionally, matched bearings are used for support since they can be preloaded to enhance the stiffness of the flywheel. The voltage supplied by the solar panel sub-assembly allows the motor speed to be controlled such that the flywheels store up to 18 times more momentum than required. Motor control is facilitated by an Arduino microcontroller, Arduino BLDC shield, and various wire connections.
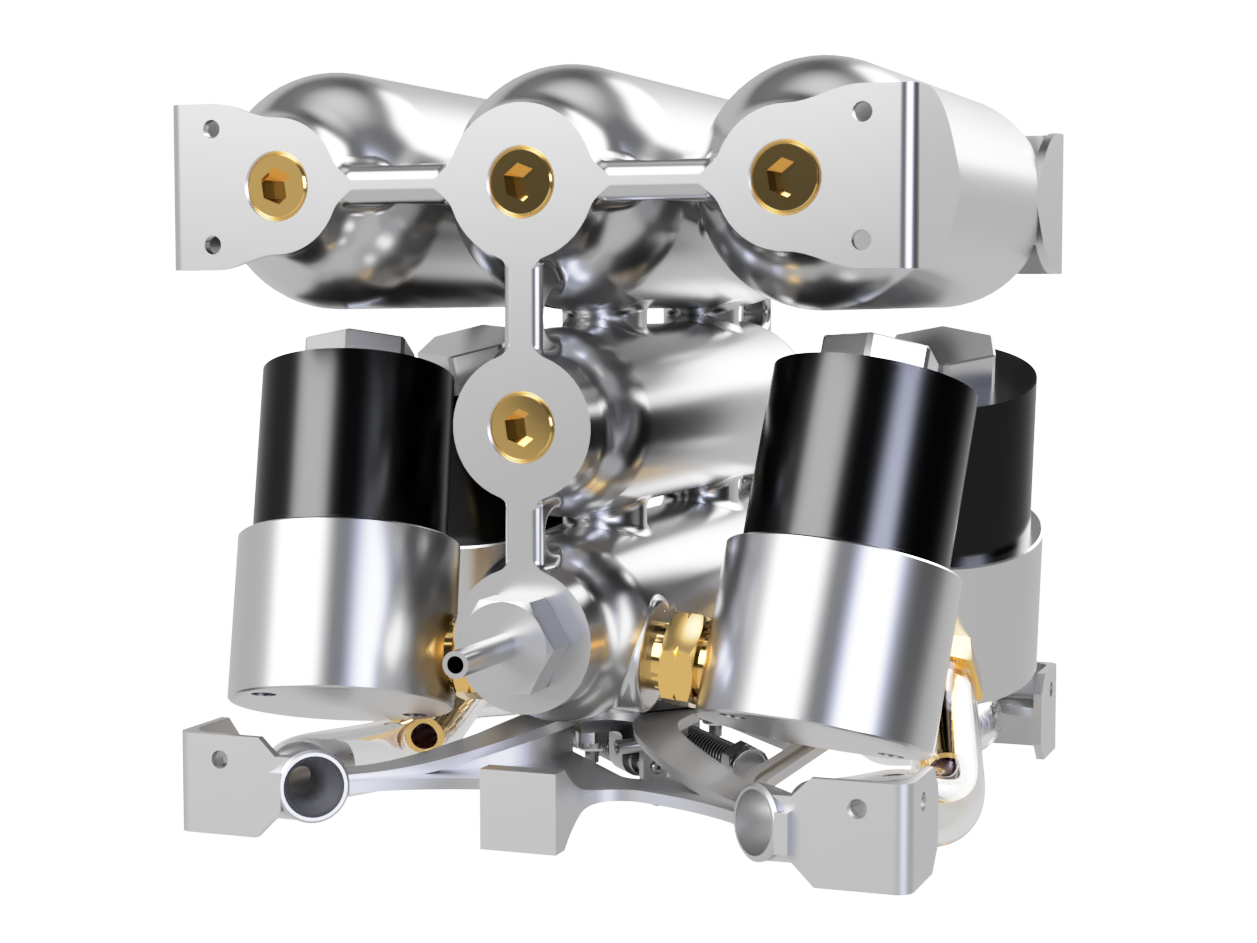
Satellite design and engineering has always been the cutting edge of engineering, with high-performance systems being required to operate for decades without maintenance. This makes space-systems time-intensive and expensive to develop, with none more so than reaction-based attitude control systems, used to prolong the life of a satellite. Whilst a CubeSat of this size normally does not include a thruster assembly, one was envisioned in this case to act as a means to control satellite position and to provide desaturation capacities to the reaction wheels.
To achieve this, a cold-gas thruster system was designed, complete with supersonic nozzles, solenoid valves for flow control, and a 60-bar pressurised tank for the propellant (helium for testing but xenon for flight applications). A four-thruster assembly was designed and optimised to provide desaturation capability along all 6 axes by firing in pairs. The overall design was then integrated into only two custom, stainless steel additively manufactured parts, miniaturised to fit into the allocated 100 × 100 × 100 mm volume. Due to the unusual nature of the project, a custom test-rig had to be designed and instrumentation purchased. These interfaced with an Arduino-based data-acquisition system, ready for testing in a vacuum chamber.
 See the Poster
See the Poster