The exploration of Mars has been one of the most coveted topics of space research since the Cold War. Many countries have attempted missions, some successful and some unsuccessful, with many ongoing today, such as the Perseverance rover, which recently touched down on the surface with the mission of looking for past life on the planet.
This DMT project has involved the design, development and assembly of a Mars rover capable of driving around a 10 km radius from its landing site while collecting rock core samples from the planet's subsurface. As the prime aim of this mission is the exploration of the unfamiliar planet, a landing site was selected: the Chryse Planitia, where the Viking 1 Lander resides. This choice allowed for the detailed analysis of the environmental conditions which the rover will face, including solar irradiance, the frequency of dust storms and, most importantly, the promising quality of the surface terrain for investigation purposes.
The prime objective targeted the construction of a robust, mobile and standalone mechanical system with the secondary aim of allowing future projects to implement further additions to the rover. The rover should be able to withstand launch conditions similar to those of the ARIANE 5 launcher, as well as staying within the stipulated mass and size constraints. For this purpose, three sub-assemblies focused on the different fundamental components of the rover embodiment: i) suspension and propulsion, ii) structural frame and integrity, iii) experimental deployment system.
Click the arrow to show/hide an individual project.
DMT03A Suspension and Propulsion
The challenging landscape of Mars means that a rover requires strong, all terrain capabilities. The presence of sensitive equipment on the rover also requires that a sturdy suspension system be implemented to prevent damage occurring while the rover travels. Due to the immense costs of sending a payload through space, the suspension and propulsion system was designed to be as light as possible.
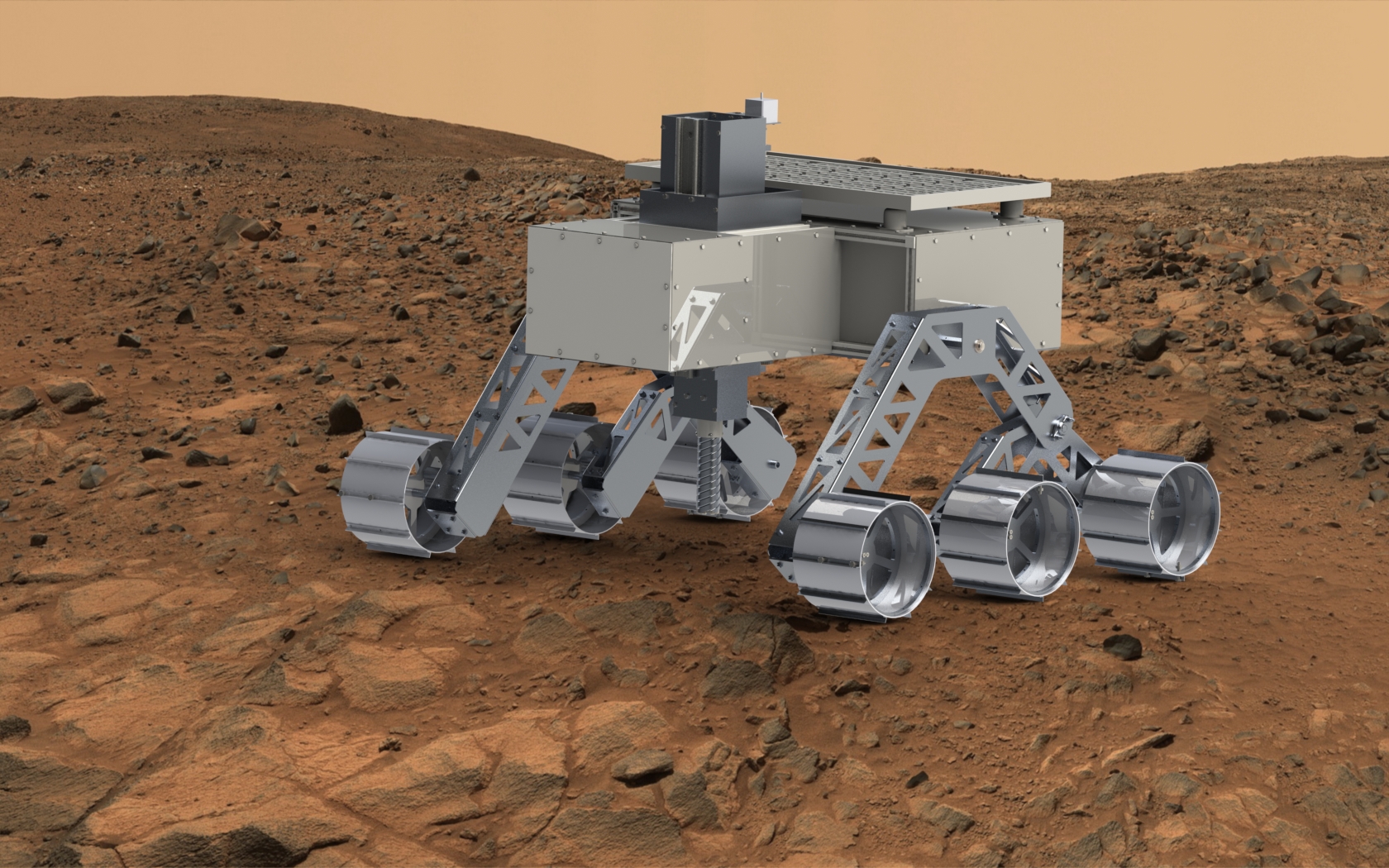
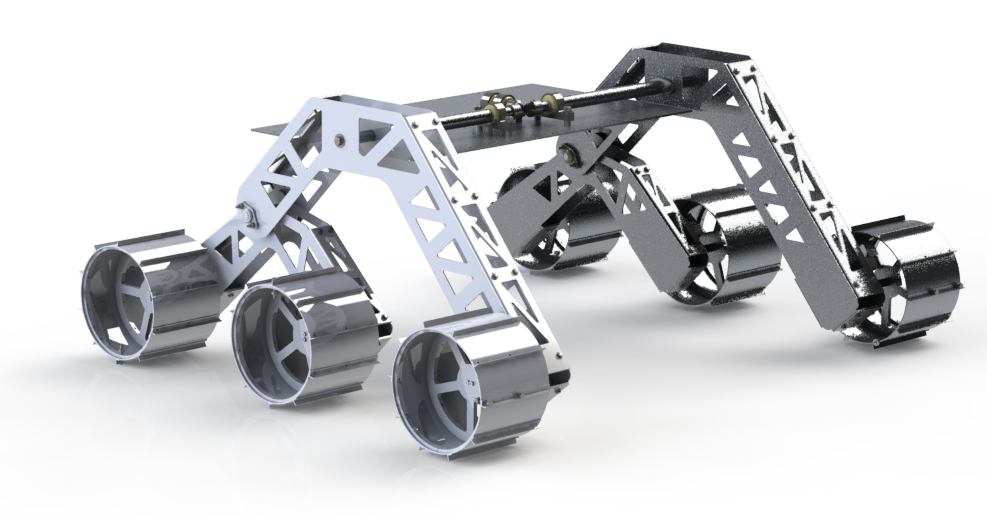
The final propulsion system is a rocker bogie design with six individually driven wheels. This is a design implemented in many existing successful rovers. It was chosen as it allows for equal weight distribution on the ground to maximise traction and allow the rover to traverse obstacles of a height up to 350mm. The rocker bogie design also has the benefit minimising the inclination of the central frame. This design also avoids the need for a spring suspension system that would be problematic during launch.
The rocker bogies are manufactured from folded sheet aluminium and enclose the geared transmission system to protect it from damage. The wheels consist of a rolled aluminium skin that encompass a skeletal steel structure which provides rigidity. A differential system is used to connect the two rocker bogies – this is what allows the rover frame to maintain an average inclination of the two rocker bogies and helps keep the other subassemblies level during travel.
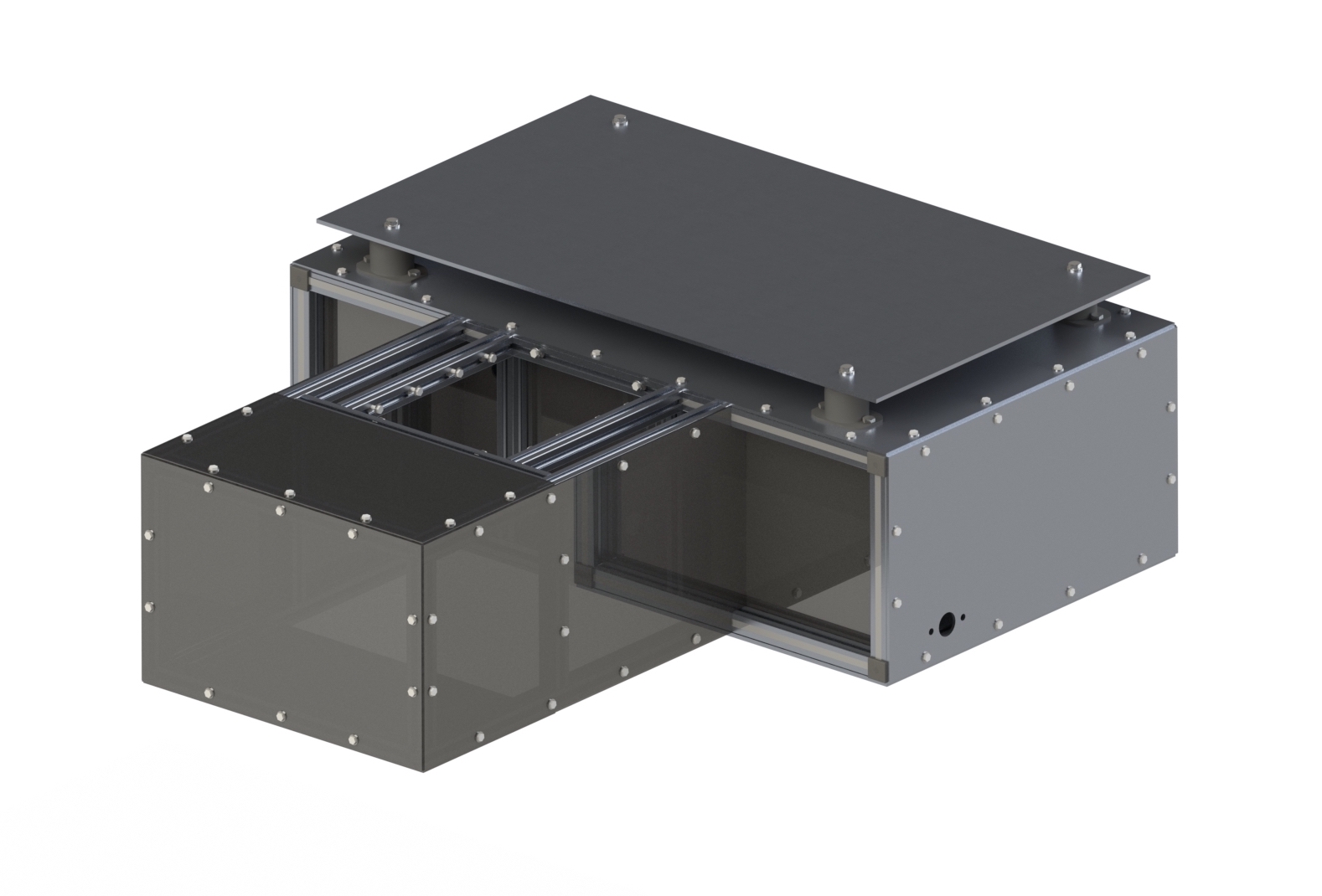
Martian expedition has inspired numerous vehicle-creation programmes around the globe. This project targets the construction of the Mars rover's structural frame and it has been designed to meet the challenges involved in Martian exploration. The proposed structure will provide a supportive mechanism, protecting the rover's internal components whilst incorporating the other main elements of the rover: the propulsion system and the experimental deployment system.
The frame is composed of aluminium extrusion profiles onto which polycarbonate and aluminium composite material (ACM) panels are attached. Material selection has targeted a robust, modular and lightweight structure. Moreover, optimal mass balance has been determined to ensure a stable design operation. Computer aided simulations show that the structure will not experience critical natural frequencies during launch and operation.
A solar panel, supported by a suspension system, rests on the body's top surface for power generation. The suspension system was created following an analysis in MATLAB, providing stability to the solar panel during launch. Moreover, an optimal horizontal photovoltaic cell configuration was chosen following rigorous calculations based on the selected landing site.
Regarding the integration of other subassemblies, access for drilling operation and sample retrieval has been designed. Moreover, the rocker-bogie system has been incorporated via the use of bearing housing mounts. Due to the severe Martian conditions that the rover will face, several sealing mechanisms have been researched and implemented to avoid any particle or dust ingress.
At the time of writing, the collection of core geological samples has not yet been accomplished on a celestial body. It will be attempted for the very first time by NASA's Perseverance Rover, generating a lot of excitement among space enthusiasts and the scientific community. Core samples contain high levels of geological information. Once analysed, they will teach us more about Mars' ancient environment and whether it was once capable of supporting life.
As part of the Mars Rover project, the experimental deployment system is designed to drill into the martian subsurface and collect small core samples of sedimentary rock. The experiment fits coherently with the rover propulsion and frame assemblies, designed by DMT groups 03A and 03B respectively. During a single trip, the experiment can collect 6 core samples (18 mm in diameter and 100 mm in length) from the martian subsurface and store them safely onboard to be retrieved and examined later in the context of a futuristic human presence on Mars. The assembly consists of an arm capable of extending 650 mm down. At its end, a custom core drill penetrates the martian surface and secures a sample which is then lifted back up and placed in a rotating storage.
 See the Poster
See the Poster