Project 05 Biomechanical Rehabilitation for Long COVID
Following the COVID-19 outbreak in December 2019, the symptoms of Long COVID have become increasingly prevalent. Long COVID patients can suffer with persisting symptoms such as fatigue and muscle atrophy, long after they have been released from hospital. These people find it difficult to return to regular daily activities, with walking and reaching for high objects becoming a real challenge.
This super project aimed to create a device that would help people suffering with Long-Covid return to daily life. The groups decided on a motorised, single shoulder exoskeleton to actively assist arm movement in front of the body whilst allowing free movement in all other planes.
The design support structure mimics a backpack to make it easy for users to put the exoskeleton on and take it off again. The structure was also designed to fit 5th to 95th percentile user torso lengths, arm lengths and circumferences.
DMT05A Support Frame
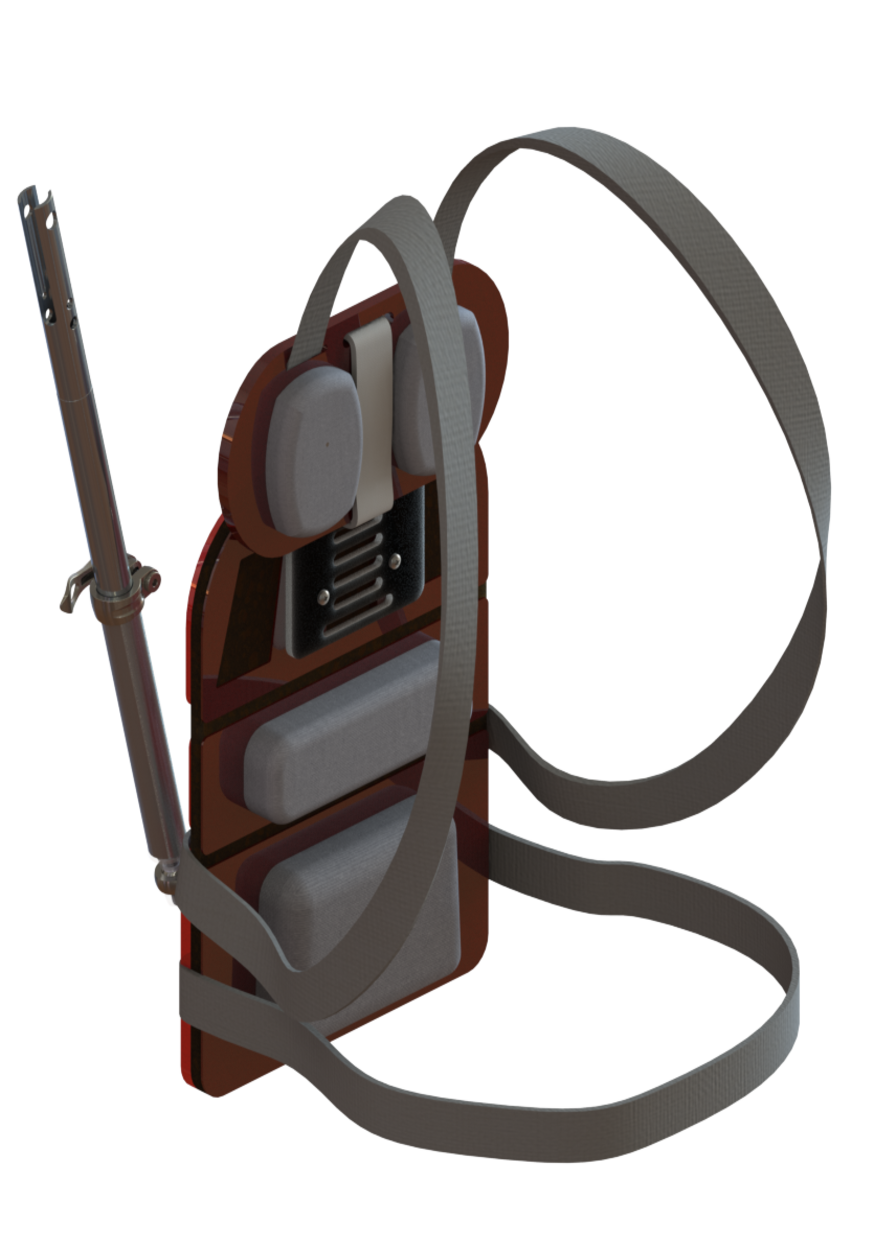
The focus of this particular sub-assembly was to design a backpack-like support frame for the device, which acts as the interface between the user's body and the moving parts of the device. The support frame puts a high priority on user comfort, considering people suffering with Long COVID are often weak, and the forces generated by the device are considerable.
A critical function of the support frame is to distribute the forces created by the motor box to lift the arm. This was achieved using an aluminium vertical support bar, which is directed into a polycarbonate backplate frame. A cable runs through the aluminium support bar, connecting the actuation box to a pulley hinged at the shoulder. A ball and socket joint is used at the base of the aluminium support bar, which alongside the pulley hinged at the shoulder, aims to replicate the range of motion of a human arm.
High stress concentrations at the base of the ball and socket joint are accommodated by a support bracket attached onto the polycarbonate backplate frame. The polycarbonate frame is height-adjustable and delivers an ergonomic design, using padding to rest on the patient's back, and an intermediate foam layer between the backplates to provide flexibility in the frame.
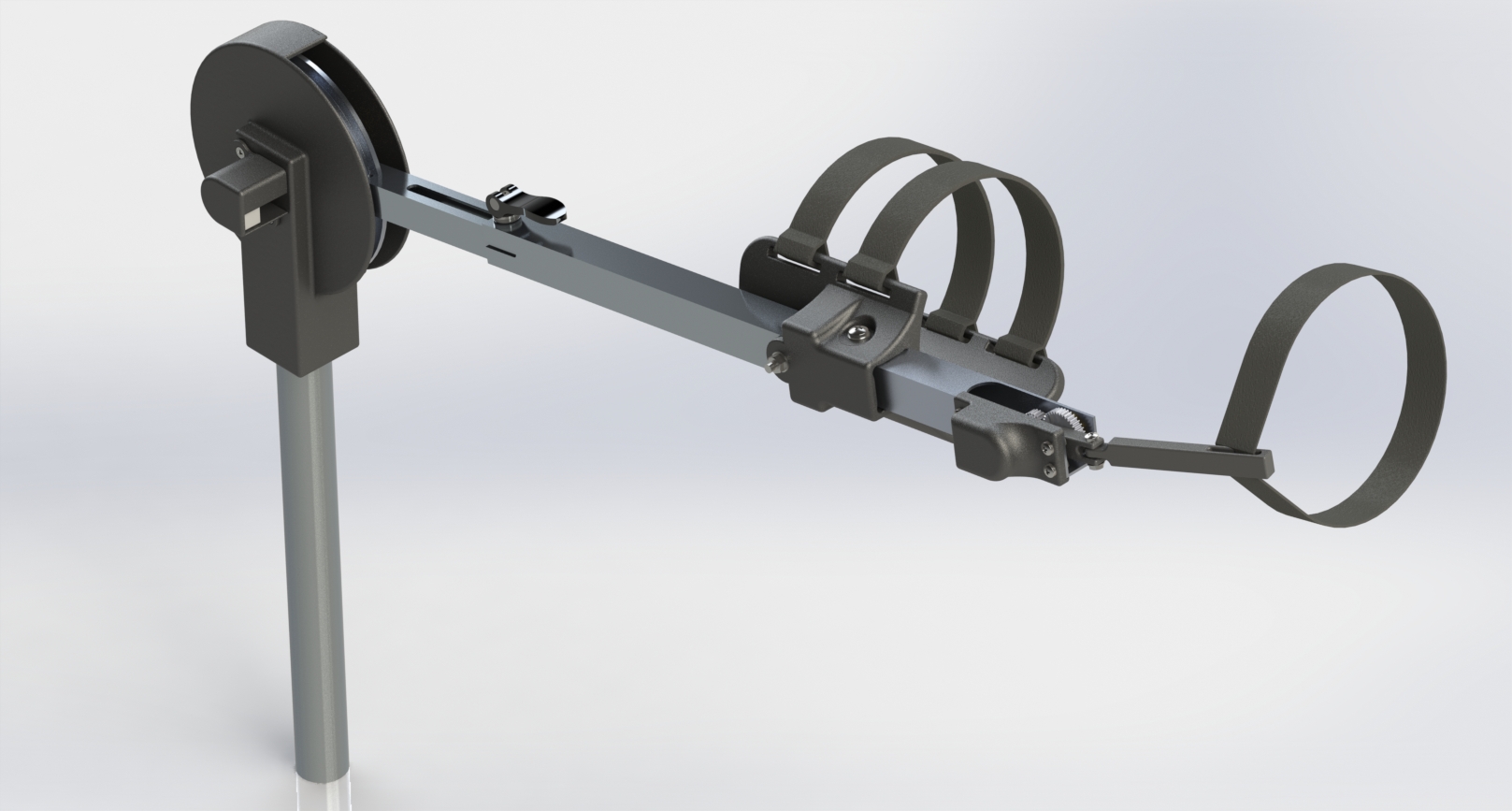
The aim of this subassembly is to transfer force output from a motor to the user's upper arm in a comfortable and controlled way, without restricting shoulder motion. The design also houses angular encoders and strain gauges for the control system.
The system aims to mirror the shoulder joint using a ball joint and pulley, to ensure that the force on the user's arm lifts it in front of them (flexion). The cuff is secured to the upper arm using two Velcro straps, and a smaller lever at the end, straps to the user's forearm.
A transmission cable from the motor (in the actuation subassembly) is routed internally through the vertical structural element. The cable is fixed to the pulley, so that any tension applied causes the pulley to rotate. The force is transferred to the user's arm via the support bar and cuff. This causes the user's arm to be raised in front of them.
There are multiple hinges incorporated into the design to ensure full motion of the arm and elbow. A clamp system allows the exoskeleton to be used for 5th to 95th percentile arm lengths, whilst straps on the arm cuff and forearm provide adjustability for different arm circumferences. The low weight of the subassembly (700g) helps to reduce fatigue induced by wearing device.
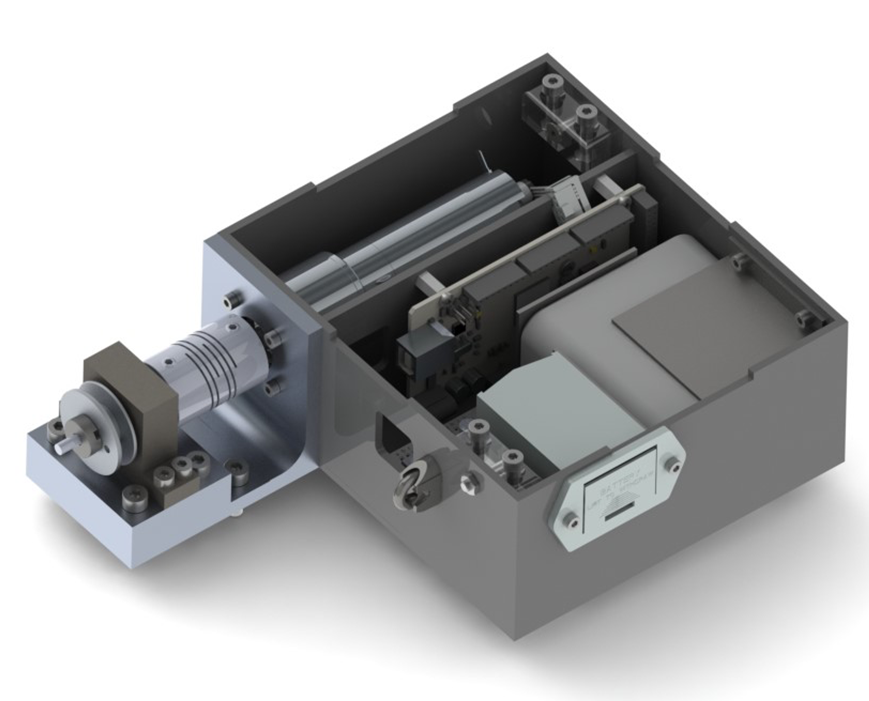
The actuation sub team was tasked with creating a transmission and control system that can power the shoulder exoskeleton and actively control the device. A gravity compensation approach was taken to counterbalance the weight of the arm with the torque provided by our drive transmission.
At the heart of the control system is a microcontroller and motor driver configuration which uses encoders and a strain gauge to continuously monitor the position and shape of the arm and calculate the required torque required at the shoulder. Using a gearbox and pulley system, the motor is then able to apply an appropriate torque which is amplified to reach the correct value at the shoulder.
Being a device for patients with muscle fatigue, the subassembly was designed using light materials to keep the weight low and compact components to ensure the case is small and does not protrude from the body too much. Making the device easy to use, rechargeable and repairable were key to making the device functional and easy to maintain.

 See the Poster
See the Poster